Hi,您当前浏览器版本过低,可能会影响浏览效果,建议下载使用感更好的浏览器,或者使用360浏览器极速模式浏览!

自动驾驶的第一要务是保证安全。从目前大多数车企、自动驾驶企业选择的主流方案来看,激光雷达是自动驾驶必不可少的传感器。
从功能上看,车载激光雷可以分为两类:一是负责前向感知的前视激光雷达,二是负责车身周边环境感知的补盲激光雷达。这两类产品存在的最终目的,都是为了通过360°全域无盲区感知,让安全的自动驾驶成为现实。
a. 自动泊车场景
在自动驾驶的泊车、城区和高速三大场景中,如果不增加补盲激光雷达,能否实现自动泊车(AVP)、交通拥堵自动驾驶(TJP)、高速公路领航驾驶(HWP)等核心功能呢?
迄今,AVP功能的实现依靠的是“视觉+超声波”的感知方案,其中视觉感知多用于识别车位,超声波感知多用于防止碰撞。
这一方案对实际场景的处理能力有限,其主要原因在于传感器的精度,导致无法有效提供可靠的碰撞边界感知能力。尤其在光照度不佳及区域纹理辨识度不好的条件下,比如地下停车场、立体停车场等,这一方案深度辨识能力不稳定的弊端体现得更为明显。这一弊端导致的直接后果就是AVP功能体验较差,在停车场容易引起擦碰。
在此基础上,如果只增加一颗前视激光雷达,会怎样?
增加前视激光雷达后,“视觉+超声波+前视激光雷达”的融合感知方案虽然在前视激光雷达的FOV范围内实现稳定的碰撞边界感知,而且还可以通过SLAM等技术,对历史观测区域进行拼接,从而拓展感知区域。但实际上,这一方案对车身周围的障碍物,依然缺乏相应的有效感知能力,碰撞边界感知无法完全覆盖车身的360°全域范围。
b. 城区场景
在城区场景下,纯视觉方案由于硬件特性的限制,目前仅足以支持较为基础的辅助驾驶功能应用,距离实现TJP功能还有一段距离要走。
增加前视激光雷达后,“视觉+前视激光雷达”的感知方案在前视激光雷达的FOV范围内较大地提升了对目标的检测和测量精度,虽然对城区内前向直行行驶场景的感知能力提升较大,但在路况转弯、变道、汇入车流等场景中仍存在侧向感知盲区,只能实现有限的城区场景自动驾驶功能。
c. 高速场景
高速场景下有较多的结构化道路场景,纯视觉方案虽然能够提供比较舒适的辅助驾驶体验,但它对异形障碍物识别存在缺陷,并且在他车加塞及自动换道等场景下,只具备有限的处理能力。
而“视觉+前视激光雷达”方案,虽然能在有效解决异型物体识别问题之外,提升结构化道路场景的他车加塞应对能力,但由于侧向无激光雷达提供环境感知,导致无法完全解决加塞和变道问题。
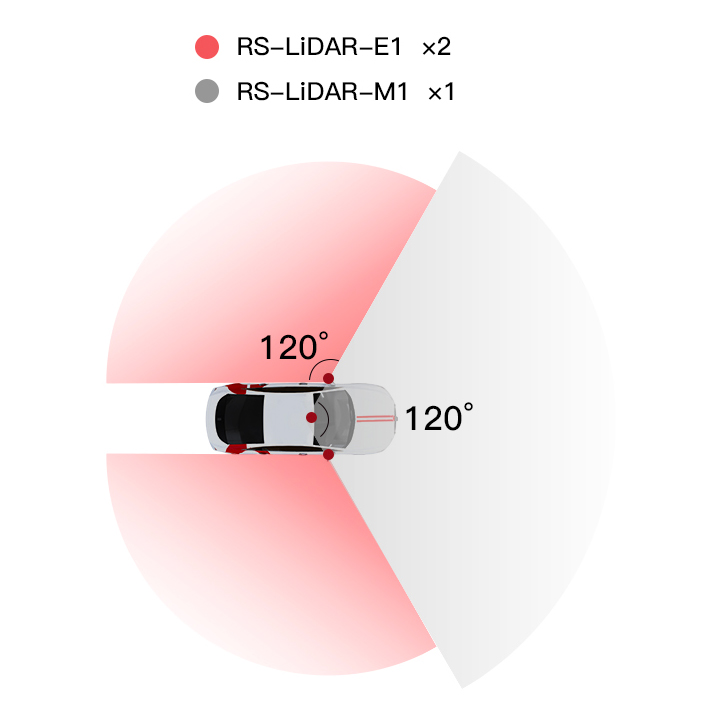
1. 增加两颗E1,“视觉+360°激光雷达”感知方案
在“视觉+前视激光雷达”感知方案的基础上,通过增加两颗E1,就可以构成“视觉+360°激光雷达”的感知方案,实现360°的全覆盖、无盲区感知效果。
泊车场景下,这一方案将提供精确、无死角的碰撞边界感知,实现安全的泊车应用。
城区场景中,这一方案可以解决侧向盲区和异形目标检测问题,弥补了前向激光雷达FOV以外区域的感知效果差异,能够有效应对加塞和变道,有效应对复杂的城区工况。尤其是在城区路口转弯、人车混行道路等场景下,由于交通参与者的构成比较复杂,E1能起到的作用更为显著。
对于高速场景,这一方案能有效感知加塞及变道时周围运动物体的动态变化,从而保障车辆行驶的安全性及功能舒适性。
2. 补盲激光雷达,自动驾驶的必要“拼图”
在高速、城区及智能泊车场景下,车辆智能驾驶核心功能对于补盲感知的需求日渐提升。E1这款革命性的产品,将作为实现自动驾驶核心功能的关键拼图,为自动驾驶汽车打造超越人类眼睛的环境感知能力,助力合作伙伴进一步提升智能驾驶的全场景感知能力。
相关产品:自研芯片,首款高性能全固态补盲激光雷达RS-LiDAR-E1
 深圳市南山区桃源街道留仙大道1213号众冠红花岭工业南区2区9栋
深圳市南山区桃源街道留仙大道1213号众冠红花岭工业南区2区9栋 service@robosense.cn
service@robosense.cn 0755-86325830
0755-86325830



反舞弊举报邮箱:
voice@robosense.cn