Hi,您当前浏览器版本过低,可能会影响浏览效果,建议下载使用感更好的浏览器,或者使用360浏览器极速模式浏览!

前言:2022年1月,RoboSense(速腾聚创)全新一代128线激光雷达RS-Ruby Plus(简称“Ruby Plus”)于CES2022国际消费电子展首发亮相。随后,Ruby Plus获得了来自全球多家顶级无人驾驶公司批量订单,并将为其商业化运营项目提供强大助力。本文将为您详细解读Ruby Plus的升级要点,及其感知能力的跃升。
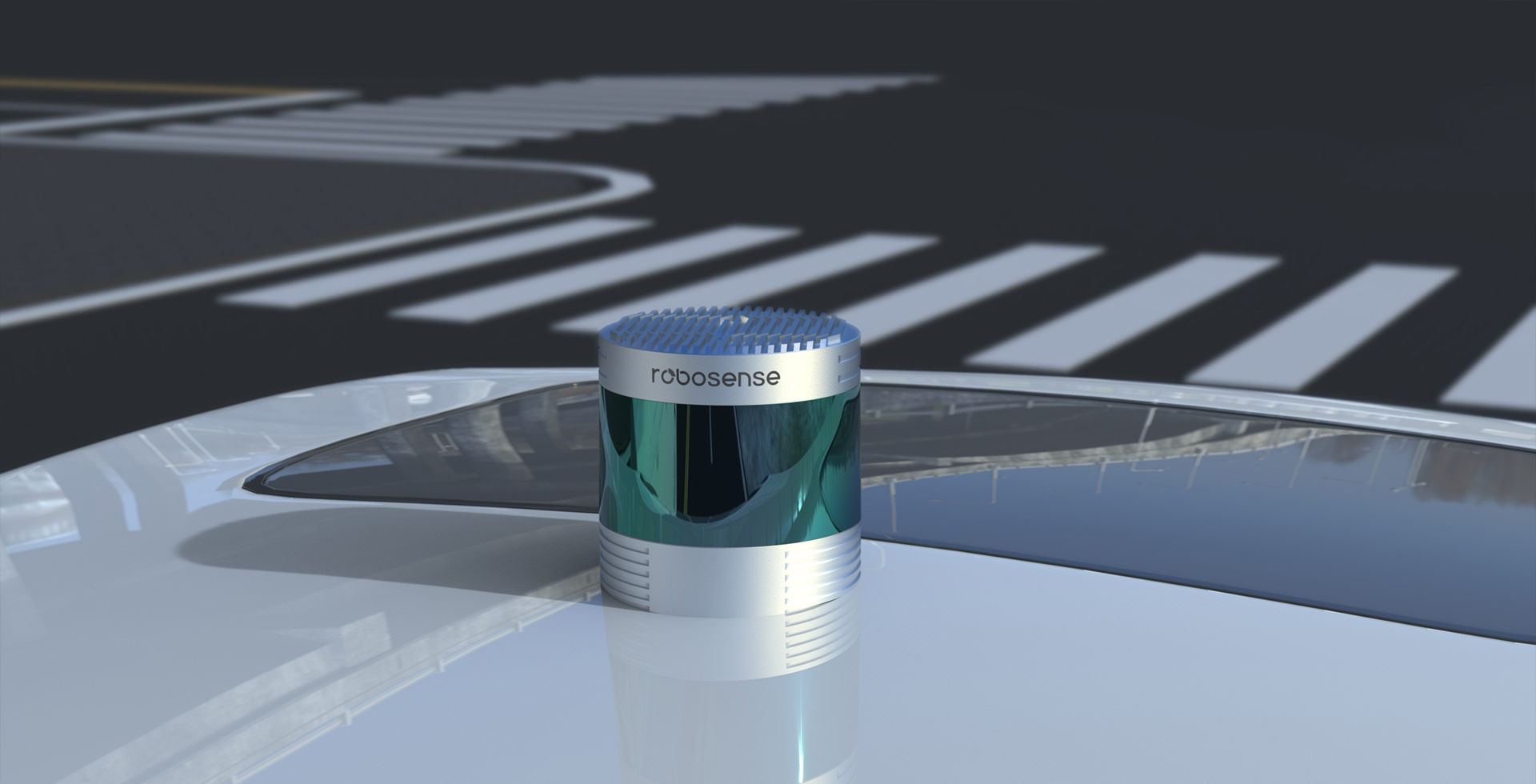
在自我突破的进阶之路上,RoboSense(速腾聚创)选择破而后立的涅槃,在新一代机械式旗舰机型Ruby Plus上采用全新模块化架构设计,大幅提升性能、功耗降低33%、体积和重量均减少50%,同时实现了结构精简与装调难度大幅降低的优势。

△ RS-Ruby Plus与RS-Ruby 外观对比与性能参数对比
过去两年,前代128线激光雷达RS-Ruby凭借强大的产品性能和可靠性表现,获得大量部署和广泛应用,助力上汽·享道、蘑菇车联、智行者、元戎启行、AutoX等RoboTaxi车队开展商业化试运营,守护上海、深圳、苏州等多个城市的无人驾驶运营安全。

△ 上汽·享道搭载RS-Ruby与RS-Helios的RoboTaxi运营车队

△ 蘑菇车联搭载RS-Ruby的RoboTaxi运营车队

△ 智行者与T3出行搭载RS-Ruby与RS-Bpearl的RoboTaxi运营车队

△ AutoX搭载RS-Ruby的RoboTaxi运营车队
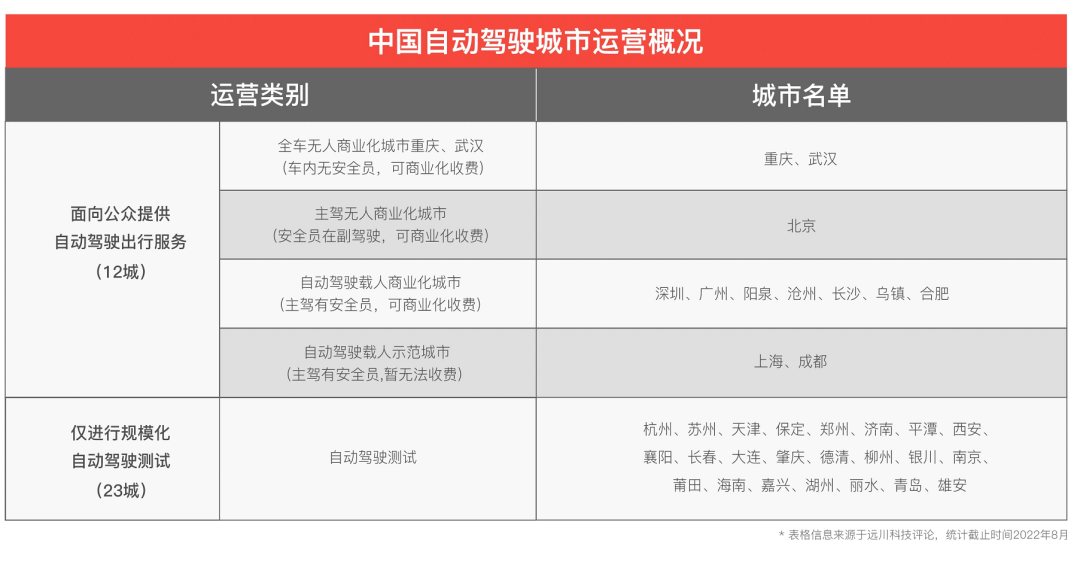
2022年8月,交通运输部发布《自动驾驶汽车运输安全服务指南(试行)》(征求意见稿),深圳市正式开始施行《深圳经济特区智能网联汽车管理条例》,重庆市与武汉市更进一步,《重庆市永川区智能网联汽车政策先行区道路测试与应用管理试行办法》与《武汉市智能网联汽车道路测试和示范应用管理实施细则(试行)》开始允许获得通知书的示范应用主体开展车内无安全员的远程商业运营。
国家与地方政策的集中出台,正式拉开了无人驾驶行业商业化运营的帷幕,无人驾驶行业踏入了有法可依、有例可循的发展新阶段。
然而,在大规模商业化的契机面前,无人驾驶行业也面临着新的考验——如何在更大范围的公开道路场景运营中,进一步提升安全性保障与舒适度体验。这不仅对无人驾驶企业而言是技术挑战,同时也对激光雷达硬件提出了更高的要求。
在与无人驾驶客户长期的合作中,RoboSense(速腾聚创)发现行业关注的痛点已经逐渐逼近机械式激光雷达的极限:
1. 机械式激光雷达,能否达到车规级可靠性?
2. 感知距离还不够远,能否突破200米?
3. 如何解决对黑色车辆等低反物体的检测难题?
4. 检出地面车道线的长度能否更长?
……
追求极致是RoboSense(速腾聚创)的核心文化价值观之一,当它作为客户对机械式激光雷达需求的时候,打造一款触及理论上限的机械式旗舰机型,就成为了Ruby Plus诞生的契机。
点击查看视频→RS-Ruby Plus在多种场景中的实测点云
1. 参考车规级可靠性设计,满足运营作业工况
作为无人驾驶的“眼睛”,激光雷达的性能决定无人驾驶车辆能看多远、看多清,激光雷达的可靠性则决定这双“眼睛”能否在各类恶劣工况下都保持“睁开”。
显然,眼睛的“可靠性”是保障无人驾驶运营车辆安全的核心环节。
RoboSense(速腾聚创)参考车规级标准,对RS-Ruby Plus进行了全新架构设计,大幅降低雷达重量降低电机负荷、提升整机高低温适应性、增强电磁兼容性等等。目前,Ruby Plus的DV测试已覆盖机械冲击、随机振动、低温度启动、高压水冲击、EMC等数十项可靠性测试项目。

△ RS-Ruby Plus DV测试覆盖机械冲击、随机振动、低温度启动、高压水冲击、EMC等数十项
2. 两重升级,全面提升感知距离
感知距离,表征感知算法可以在激光雷达点云中检测障碍物的最远距离,可以说是无人驾驶汽车对激光雷达的性能表现核心需求。
由于扫描激光束之间存在夹角,所以相同大小的障碍物,距离越远,能被探测到的点数越少,障碍物点数越少也难被检测。
所以要让感知距离获得质的飞跃,必须同时提升测距能力和角分辨率(相邻扫描激光束之间的夹角)。
RS-Ruby Plus 升级要点:200米→240米(@10%NIST标准反射率),大幅提升黑色车辆检测能力。
从2018年至今,高线数机械式激光雷达的测距能力一直停留在200米@10%反射率,似乎成为了905nm方案一个上限。
秉持对极致技术的追求,RoboSense(速腾聚创)在保证人眼安全的前提下,完成905nm激光雷达测距能力的突破,赋予RS-Ruby Plus 240米@10%标准反射率的超强测距能力(100,000Lux太阳光照环境下),整体测距性能比同类产品提高了20%以上。

△ RS-Ruby Plus测距能力240米@10%反射率,比前代及同类产品高20%
RS-Ruby Plus 升级要点:0.1°×0.1°角分辨率,障碍物监测点数大幅提升
分辨率方面,升级款128线机械式激光雷达RS-Ruby Plus加入高性能模式,即在10Hz刷新率下,128个通道的水平角分辨率将从0.2°提升到0.1°,在水平方向提供更丰富点云信息。
同时,RS-Ruby Plus保持了前代RS-Ruby的0.1°垂直角分辨率——目前依然是机械式激光雷达的行业之最:104个0.1°垂直分辨率通道,精准排布在垂直视场角中间-6.51°~ +3.81°区域,该区域中包括32个240米@10%超远测距通道。

△ RS-Ruby Plus垂直视场角中-2.094°~+1.012°范围内朝向正前方障碍物的32个通道的测距能力设定为240米@10%反射率;104个0.1°垂直分辨率通道,精准排布在垂直视场角中间-6.51°~+3.81°区域
如此,RS-Ruby Plus将在高性能模式下达到0.1°x0.1°的角分辨率,单回波的出点数高达4,608,000pts/s ,超出同类产品30%以上。配合240米@10%反射率的超强测距能力,RS-Ruby Plus检测218米处的小轿车,可扫描出4行13点,感知距离远超同类产品。

△ RS-Ruby Plus检测218米处的小轿车,4行13点
3. 黑色车辆检测能力跃升
黑色车辆是典型的低反射率障碍物,对激光的回波强度低,激光雷达扫描黑色车辆的点数明显少于相同距离下的白色车辆,是考验激光雷达测距能力的经典Corner Case(长尾问题)。
假设有一款分辨率为0.125°x0.1°、测距能力为200米@10%反射率的激光雷达。当它检测200米处大小相同的白色和黑色车辆时,白色车辆会返回5~7个点,而黑色车辆则只有3~6个点,有些车漆特殊的黑色车辆甚至可能无法返回点。然而,主流的感知算法要能稳定检出并识别障碍物,一般至少需要5个点。这意味着,这款假设的激光雷达对远距离黑色车辆的点云,可能会造成无人驾驶车辆漏检或误检。
显然,测距能力是激光雷达解决对黑车检测难题的关键。
得益于240米@10%标准反射率的超强测距能力,结合0.1°x0.1°超高分辨率,RS-Ruby Plus检测200米距离处黑色车辆的点数高达6~10个,无人驾驶汽车对黑车的检测识别能力。

△ RS-Ruby Plus可以轻松检出240米内的黑色车辆,检出车道线到85米~90米
从上面点云图还可以看出,RS-Ruby Plus对地面车道线检测能力也获得了大幅提升。
相比前代RS-Ruby的70~75米,RS-Ruby Plus可稳定检出85米~90米地面车道线,为自动驾驶车辆更快、更早、更准确感知车道变化提供了极大助力,从而进一步提升了自动驾驶车辆在变道和上下匝道时的安全性和舒适感。
4. 精度更高,成像更精细
激光雷达的精度越高,就可以越精准、越清晰地还原小尺寸物体的形状,如石墩、路杆、雪糕筒等。
在复杂交通场景中,障碍物在点云中的形状越清晰,自动驾驶汽车对他们的区分识别就越容易、越高效。
RS-Ruby Plus 测距精度提升幅度:近场区域 0.4~3m,精度 Up to ±3cm( @100,000Lux光照环境);
远场区域 3~240m,精度 Up to ±2cm(@100,000Lux光照环境)

△ RS-Ruby Plus检测1.4米处的“四色”反射率板(10%、50%、90%、高反),点云厚度约6厘米(点云越薄,测距精度越高)

△ RS-Ruby Plus实测点云,道路两侧石墩、移动护栏、路杆等障碍物轮廓细节清晰

△ 在RS-Ruby Plus高精度点云中的速小腾
5. 全面抗光干扰
RS-Ruby Plus采用了最新的激光加密技术,每次激光的收发都匹配独特密钥。
结合先进的光机系统,RS-Ruby Plus能有效屏蔽多雷达对射干扰、过滤环境光干扰与太阳光干扰(100,000Lux照度)。

△ 上:在对射干扰中,RS-Ruby Plus的原始点云
6. 车载以太网、gPTP、PTP
RS-Ruby Plus新增车载以太网接口,同时支持硬同步(GPS)和网络同步(PTP 与 gPTP时间同步)协议,大幅降低数据传输时延,简化线缆布局。
RoboSense(速腾聚创)自创立以来,始终面向市场需求,以领先行业的产品技术,推动无人驾驶行业发展。
2017年,RoboSense(速腾聚创)率先实现机械式激光雷达的国产化,打破外企的市场垄断,为行业激光雷达产品短缺“解渴”;
2019年,RoboSense(速腾聚创)面向无人驾驶试运营趋势,国内首家推出高性能128线激光雷达,成为无人驾驶商业化验证的有力臂助;
2022年,RoboSense(速腾聚创)再次推出综合表现超出行业的128线性能“天花板”RS-Ruby Plus,解决无人驾驶大规模商业运营感知难题。
如果说,国家与地方已经在法律层面为无人驾驶商业运营铺好道路,那么RS-Ruby Plus则用极致的感知能力,为无人驾驶车辆提供了高度安全可靠的“眼睛”。
RoboSense(速腾聚创)将秉持以客户需求为中心,不断突破产品技术极限,持续拓展激光雷达行业的创新疆界,持续赋能无人驾驶行业伙伴,勉力推动无人动驾驶技术大规模商业化进程,携手共创无人驾驶新时代。
 深圳市南山区桃源街道留仙大道1213号众冠红花岭工业南区2区9栋
深圳市南山区桃源街道留仙大道1213号众冠红花岭工业南区2区9栋 service@robosense.cn
service@robosense.cn 0755-86325830
0755-86325830



反舞弊举报邮箱:
voice@robosense.cn