Hi,您当前浏览器版本过低,可能会影响浏览效果,建议下载使用感更好的浏览器,或者使用360浏览器极速模式浏览!


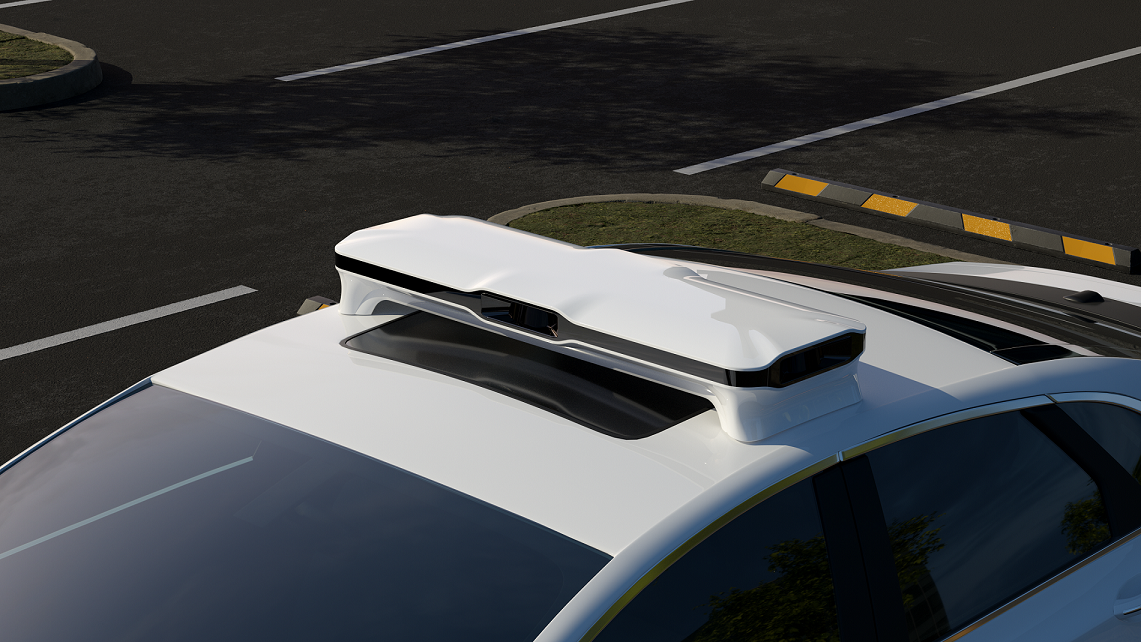
P6 is the first automotive-grade solid-state LiDAR L4 sensor fusion solution launched by RoboSense. It integrates a complete portfolio of LiDAR sensors, AI perception and MEMS chipsets. And P6 features higher perception capability and reliability, supports “one-stop” flexible LiDAR deployment, safeguards autonomous driving, and facilitates the large-scale commercial application of unmanned mobility services.
4Pieces
Automotive-grade Solid-state LiDAR Integrated360° x 25°
Field of View (FoV)200Meters
Perception Range up to7Types
Perception Coverage for Dynamic and Static Obstacles2Categories
Perception Coverage for Road Signs52Items
Obstacles Perception Date Output


Dynamic and Static Obstacles Detection
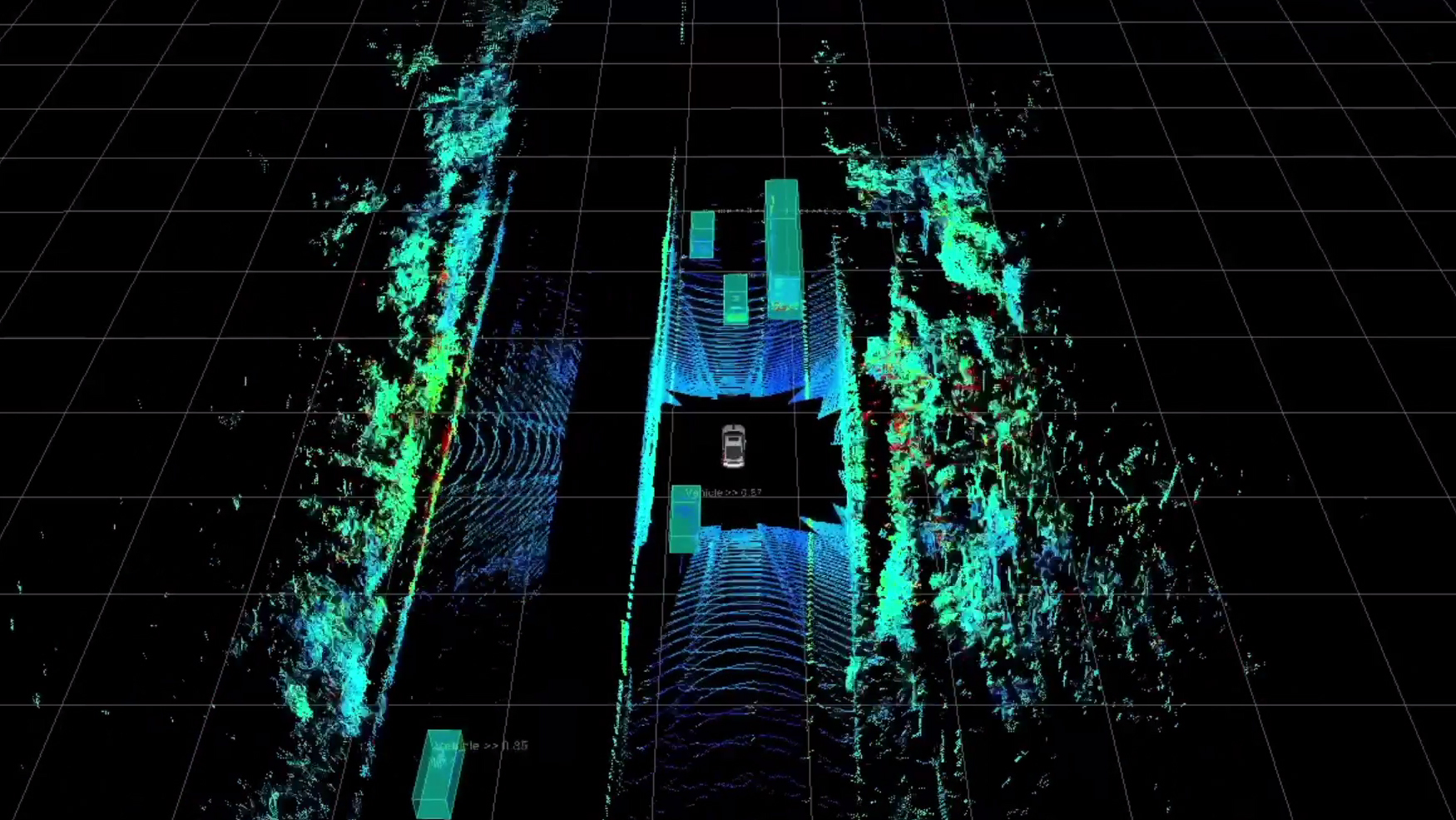
P6 can perceive dynamic and static obstacles including pedestrians, bicyclists, large vehicles, small vehicles, trailers, cones and stone piers, and output 13 types of perception information including ID, category, position, size, speed, acceleration, and direction of movement of each obstacle, totaling 52 detailed data items.
Road Sign Detection
P6 can clearly identify multiple types of road signs such as lane lines and curbs, and generate 5 data items including ID, location, curvature, area and confidence of road signs to put into the autonomous driving system.
Free Space Detection
Based on the detection results of road signs and dynamic and static obstacles, P6 will “navigate” the autonomous driving system to the drivable space.
Mixed Traffic Scenarios
Identify various types of traffic participants and wait for the safe passage opportunityUnprotected Left-turn Scenarios
Anticipate lateral incoming vehicles in advance for more decisive and safer left turnsMerging Scenarios
Perceive the position and speed of vehicles behind and merge into traffic quicklyVehicle Cutting-in Scenarios
Predict emergency vehicle cutting-in by the preceding vehicle to avoid collisions


 Building 9, Block 2, Zhongguan Honghualing Industry Southern District, 1213 Liuxian Avenue, Taoyuan Street, Nanshan District, Shenzhen, China
Building 9, Block 2, Zhongguan Honghualing Industry Southern District, 1213 Liuxian Avenue, Taoyuan Street, Nanshan District, Shenzhen, China service@robosense.cn
service@robosense.cn 0755-8632583046057 Five Mile Rd., Plymouth, MI 48170800 West El Camino Real, Suite 180, Mountain View, California 94040rsi-office@robosense.aiWhistleblower Email:voice@robosense.ai
0755-8632583046057 Five Mile Rd., Plymouth, MI 48170800 West El Camino Real, Suite 180, Mountain View, California 94040rsi-office@robosense.aiWhistleblower Email:voice@robosense.ai