Hi,您当前浏览器版本过低,可能会影响浏览效果,建议下载使用感更好的浏览器,或者使用360浏览器极速模式浏览!



Happy New Year! As we head into 2024, RoboSense' s 10th year as a company, we would like to take a moment to revisit some of our highlights from 2023.

RoboSense launched E1, a high-performance flash solid-state LiDAR

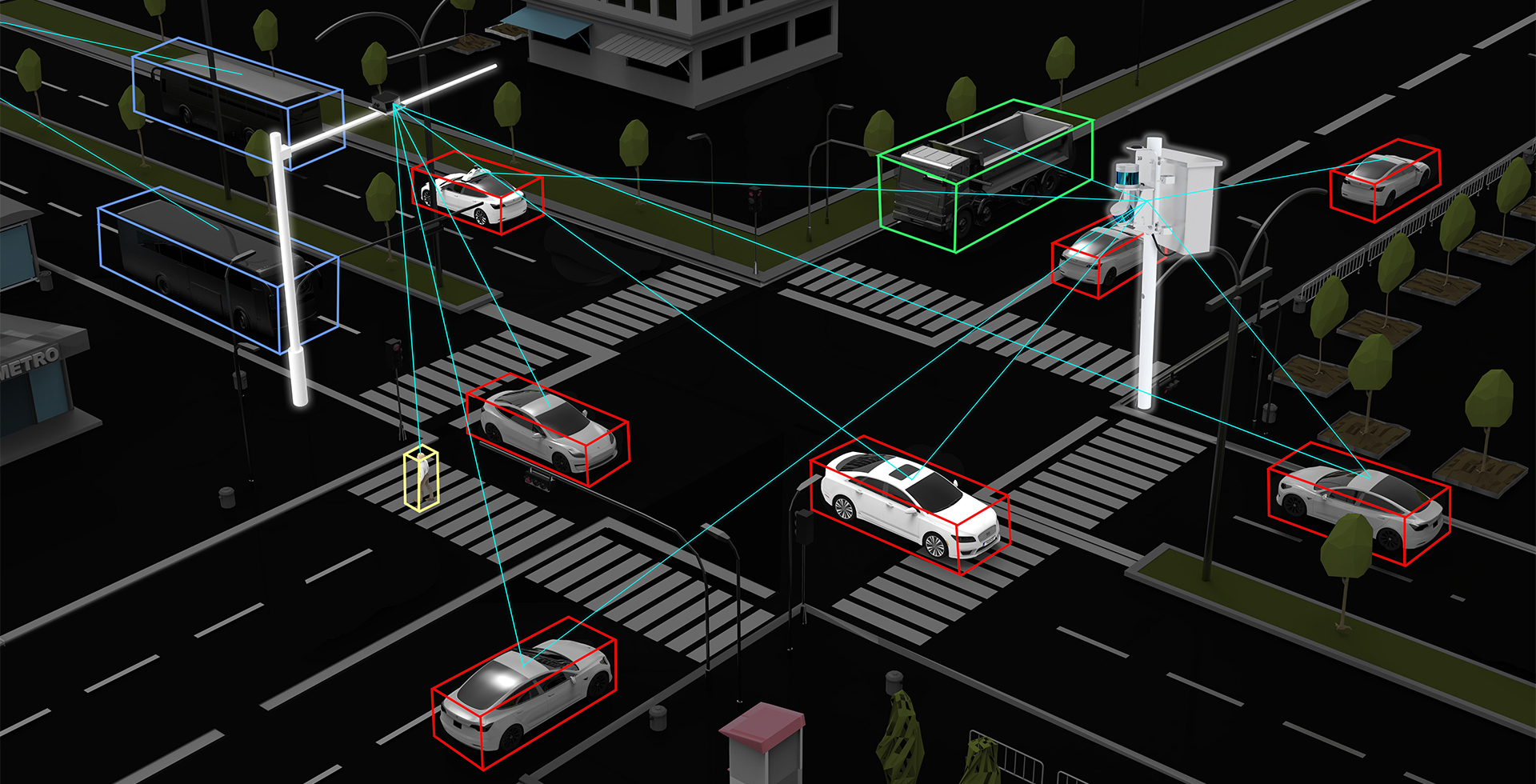
Deepening of Smart Transportation “New Infrastructure”
Artificial Intelligence (AI) best empowers intelligent vehicle testing and evaluation
What if we apply autonomous driving LiDAR to AGV?
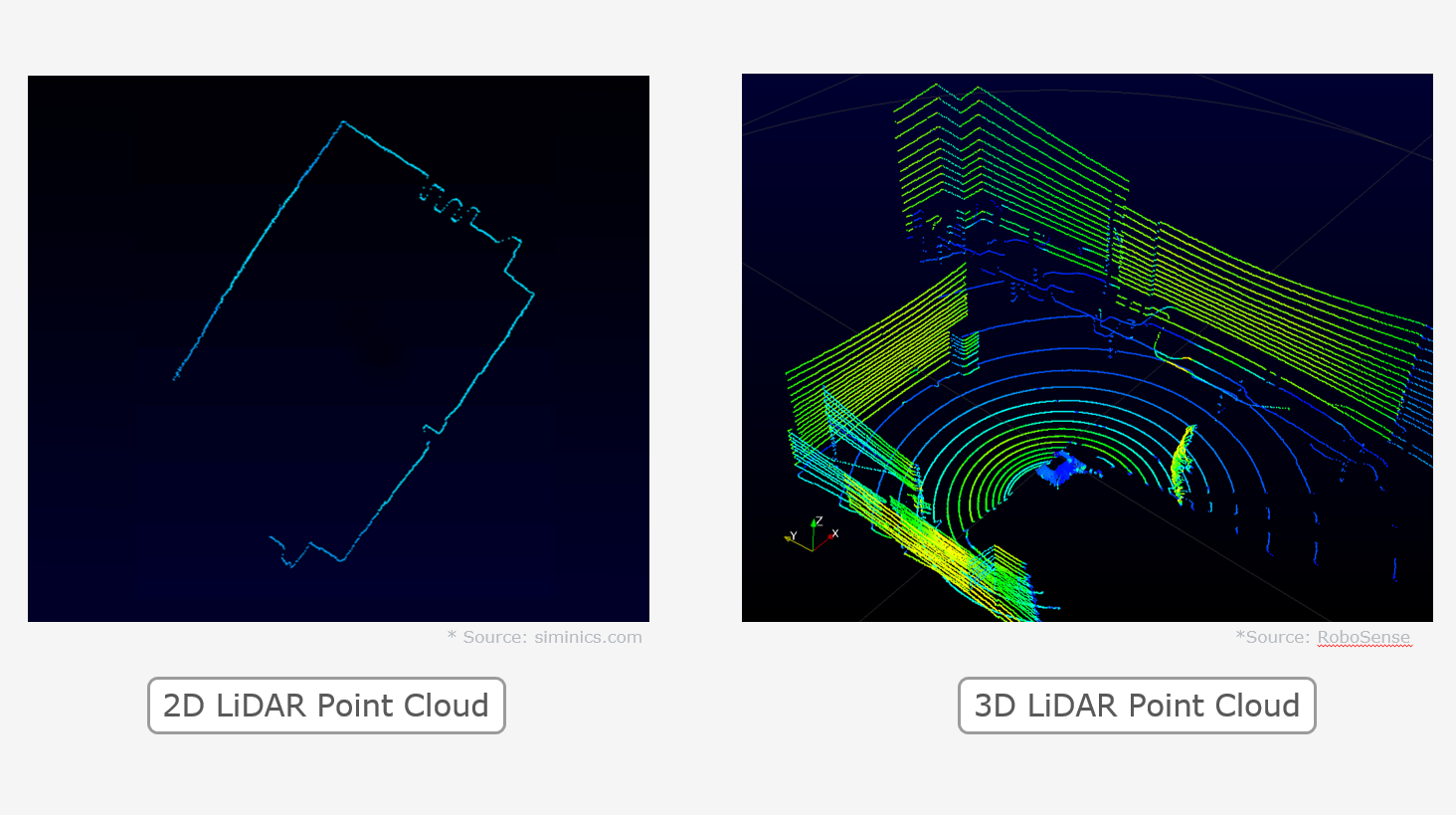
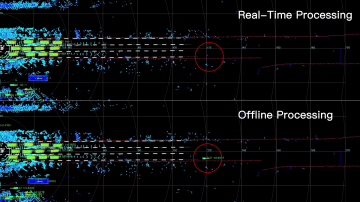
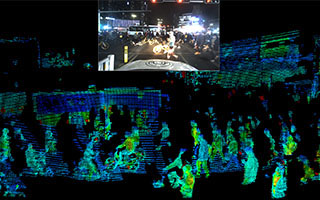
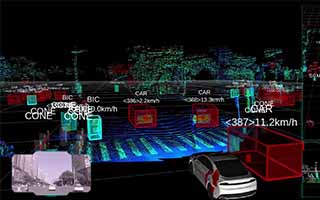
Point Cloud Quality Is The Key Criteria in Evaluating LiDAR Performance
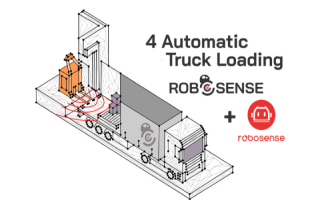
LiDAR based perception solution increases the accuracy of the AGV based truck loading/unloading systems
Why RS-Ruby is the top LiDAR in advanced autonomous driving perception, positioning and mapping?
Does LIDAR meet industry expectations?

The Five Key Aspects Of A Mass-Production-Ready, Automotive-Grade, Solid-State LiDAR
 service@robosense.cn
service@robosense.cn 0755-86325830
0755-86325830 46057 Five Mile Rd., Plymouth, MI 48170800 West El Camino Real, Suite 180, Mountain View, California 94040rsi-office@robosense.aiWhistleblower Email:voice@robosense.ai
46057 Five Mile Rd., Plymouth, MI 48170800 West El Camino Real, Suite 180, Mountain View, California 94040rsi-office@robosense.aiWhistleblower Email:voice@robosense.ai


